Nordic UFO Newsletter1983, February issue, page 5. |
|
|
|
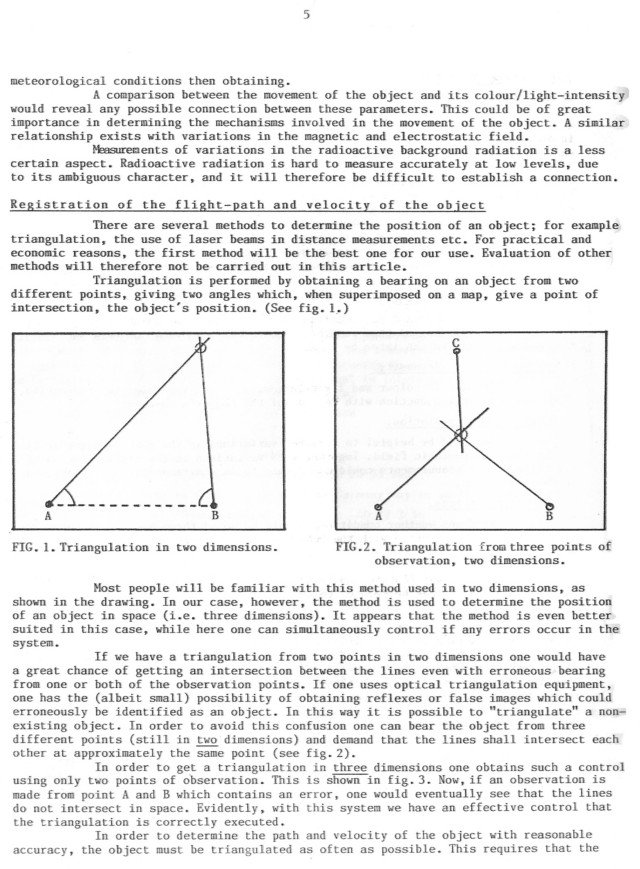
meteorological conditions then obtaining. A comparison between the movement of the object and its colour/light-intensity would reveal any possible connection between these parameters. This could be of great importance in determining the mechanisms involved in the movement of the object. A similar relationship exists with variations in the magnetic and electrostatic field. Measurements of variations in the radioactive background radiation is a less certain aspect. Radioactive radiation is hard to measure accurately at low levels. due to its ambiguous character. and it will therefore be difficult to establish a connection. Registration of the flight-path and velocity of the object There are several methods to determine the position of an object; for example triangulation, the use of laser beams in distance measurements etc. For practical and economic reasons. the first method will be the best one for our use. Evaluation of other methods will therefore not be carried out in this article. Triangulation is performed by obtaining a bearing on an object from two different points, giving two angles which, when superimposed on a map, give a point of intersection, the object's position. (See fig. 1.) FIG. 1. Triangulation in two dimensions. FIG. 2. Triangulation from three points of observation, two dimensions. Most people will be familiar with this method used in two dimensions, as shown in the drawing. In our case, however, the method is used to determine the position of an object in space (i.e. three dimensions). It appears that the method is even better suited in this case, while here one can simultaneously control if any errors occur in the system. If we have a triangulation from two points in two dimensions one would have a great chance of getting an intersection between the lines even with erroneous bearing from one or both of the observation points. If one uses optical triangulation equipment, one has the (albeit small) possibility of obtaining reflexes or false images which could erroneously be identified as an object. In this way it is possible to "triangulate" a non-existing object, In order to avoid this confusion one can bear the object from three different points (still in two dimensions) and demand that the lines shall intersect each other at approximately the same point (see fig.2). In order to get a triangulation in three dimensions one obtains such a control using only two points of observation. This is shown in fig. 3. Now, if an observation is made from point A and B which contains an error, one would eventually see that the lines do not intersect in space. Evidently. with this system we have an effective control that the triangulation is correctly executed. In order to determine the path and velocity of the object with reasonable accuracy. the object must be triangulated as often as possible. This requires that the |

