Nordic UFO Newsletter1983, numéro de février, page 5. |
|
|
|
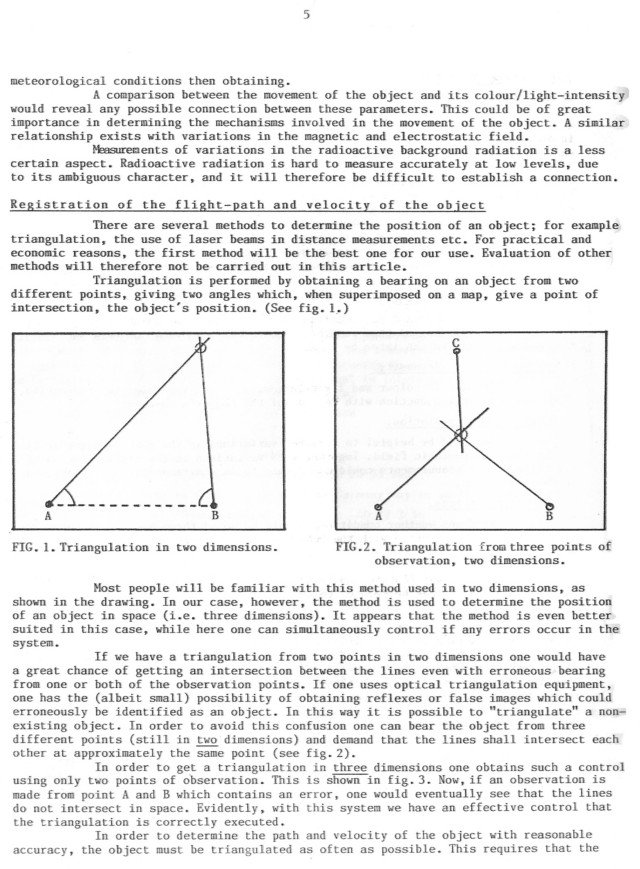
conditions météorologiques obtenant alors. Une comparaison entre le mouvement de l'objet et sa coleur/intensité lumineuse indiquerait n'importe quel lien possible entre ces paramètres. Ceci a pu être de grande importance afin de déterminer les mécanismes impliqués dans le mouvement de l'objet. Un lien semblable existe avec des variations du champ magnétique et électrostatique. Les mesures des variations du rayonnement radioactif de fond est un aspect moins certain. Il est difficile de mesurer le rayonnement radioactif exactement aux bas niveaux à cause de son caractère ambigu et il sera donc difficile d'établir un lien. Enregistrement de la trajectoire de vol et de la vitesse de l'objet Il y a plusieurs méthodes pour déterminer la position d'un objet; par exemple la triangulation, l'utilisation de rayons laser dans les mesures de distance etc... Pour des raisons pratiques et économiques la première méthode sera la meilleure pour notre usage. L'évaluation d'autres méthodes ne sera pas donc effectuée en cet article. La triangulation est réalisée en obtenant une direction vers un objet de deux points différents, donnant deux angles qui une fois superposé à une carte, donnebt un point d'intersection, la position de l'objet. (Voir fig. 1.) FIG. 1. Triangulation en deux dimensions. FIG. 2. Triangulation par trois points d'observation, deux dimensions. La plupart des gens seront familiarisés avec cette méthode employée dans deux dimensions, comme montré dans le schéma. Dans notre cas, cependant, la méthode est employée pour déterminer la position d'un objet dans l'espace (c.-à-d. trois dimensions). Il s'avère que la méthode est encore meilleure dans ce cas-ci, puisqu'ici on peut en même temps contrôler si des erreurs sont produites dans le système. Si nous avons une triangulation de deux points dans deux dimensions on aurait une grande chance d'obtenir une intersection entre les lignes même avec une direction incorrecte de l'un ou des deux points d'observation. Si on emploie de l'équipement optique de triangulation, on a la possibilité (quoique faible) d'obtenir des reflets ou des images fausses qui pourraient incorrectement être identifiés comme étant l'objet. De cette façon il est possible de "trianguler" un objet inexistant, afin d'éviter cette confusion ont peur relever la direction de l'objet depuis trois points différents (toujours en deux dimensions) et exiger que les lignes s'intersectent approximativement au même point (voir la fig.2). Afin d'obtenir une triangulation en trois dimensions on obtient un tel contrôle en utilisant seulement deux points d'observation. Ceci est montré dans la fig. 3. Maintenant, si une observation est faite à partir du point A et B qui contient une erreur, on verrait par la suite que les lignes ne s'intersectent pas dans l'espace. Evidemment avec ce système nous avons un contrôle efficace que la triangulation est correctement faite. Afin de déterminer le chemin et la vitesse de l'objet avec une exactitude raisonnable l'objet doit être triangulé aussi souvent que possible. Ceci exige que |

